知識というのは更新しないダメですね。
法線データのOctahedral Encodingをよく用いています。
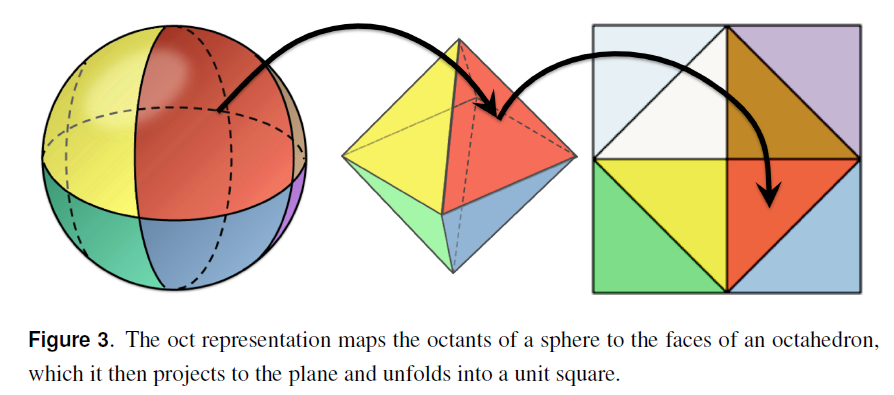
ここで,Octahedron を45度回転させて,符号をビットを別に持てば,表現する面積領域が増えるから精度が倍に上がるのと,OctWrap()の演算も無くなるので,デコードも高速できるそうです。
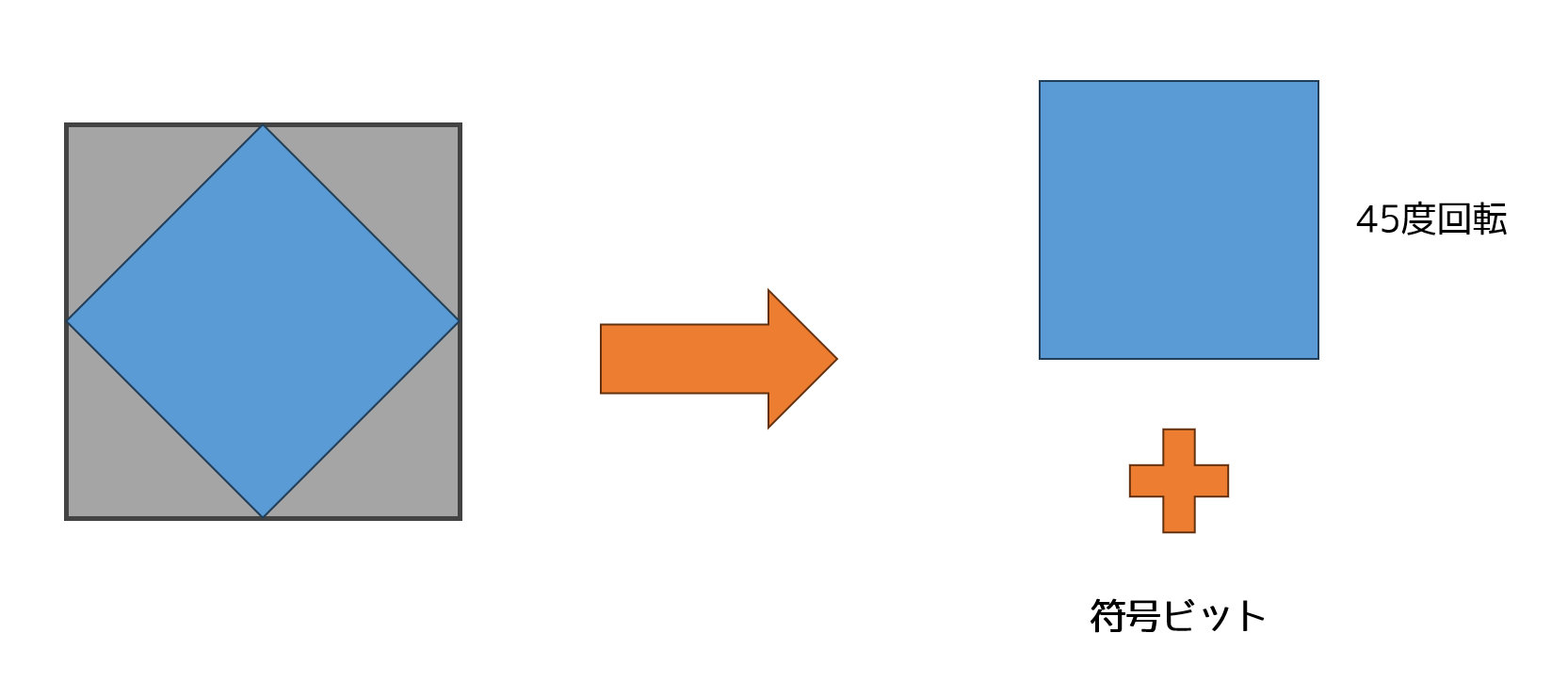
これが,John White 3Dというブログの,”Signed Octahedron Normal Encoding”という記事にのっていました。これをみて「ほぇぇ~」と感心しました。頭いい!
ただ、符号ビットを別に持つの何かやだなーと思っていたのですが,R10G10B10A2なら10bit分が残っているので,この32bitでNormal, Tangent, Bitangentを表現しちゃいたいところです。
以前に書いたかもしれませんが,SIGGRAPH 2020のDOOMで使っている,接線空間表現を使おうかなと思っていました。

しかし、今日もっといいやつを見つけました。
Jeremy Ongさんの”Tangent Spaces and Diamond Encoding”というブログ記事。この中でも上記のDOOMの方式が紹介されていますが,もっといいのがダイヤモンドエンコーディングというやつ。
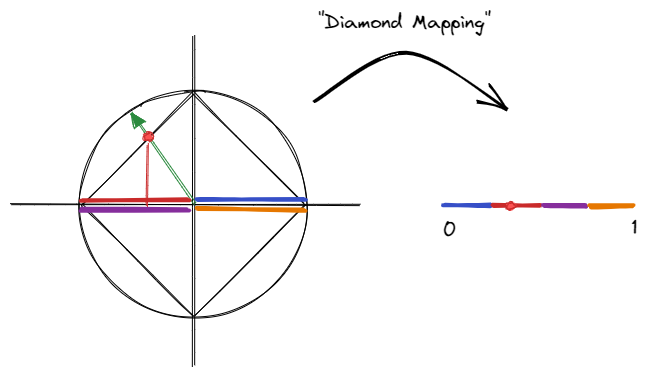
ここでも,Octahedronの考えを利用しています。ちなみにサンプルコードは下記の様です。
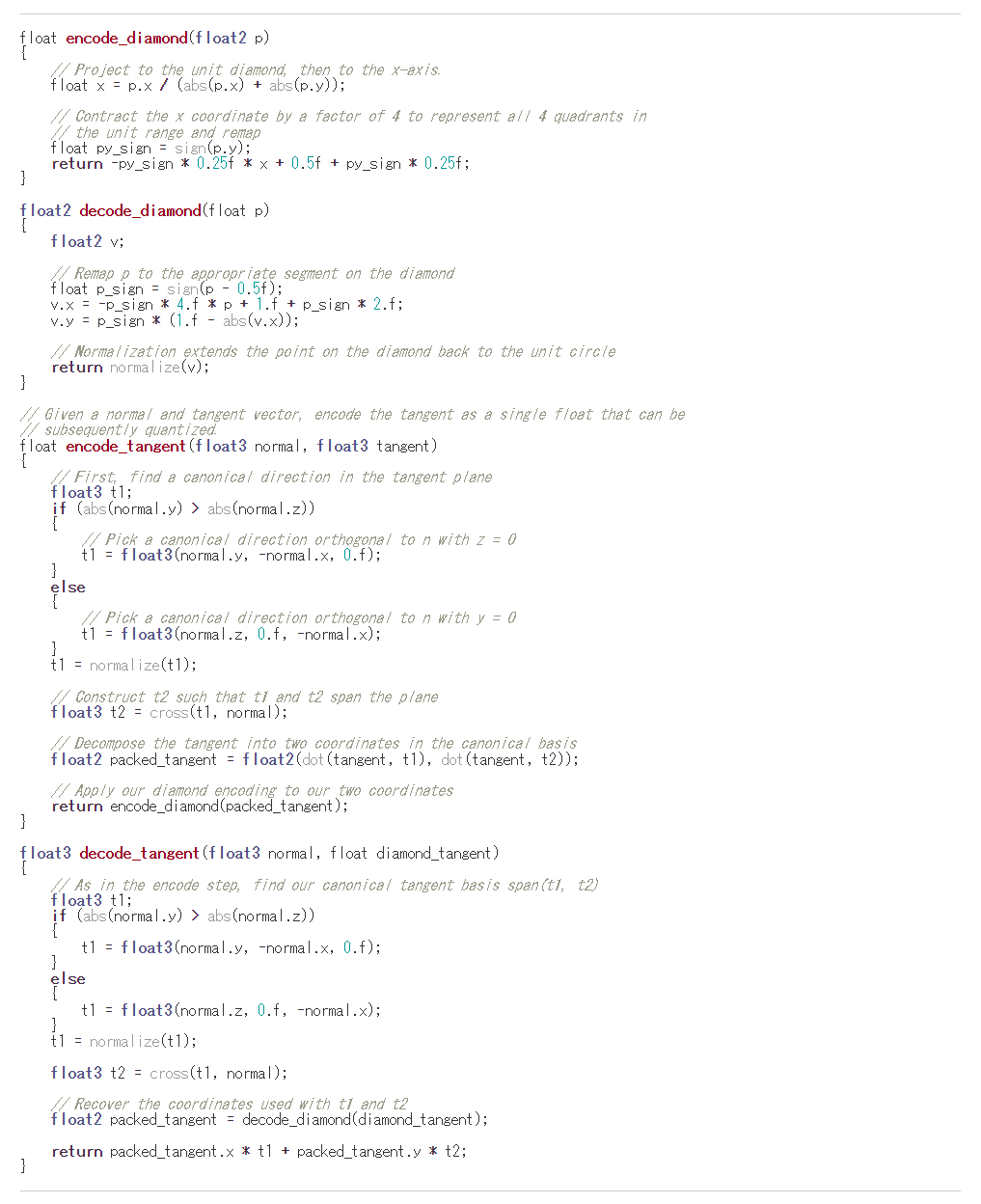
ダイヤモンドエンコードで得られた接線を表すデータを残りの10bit部分に入れてしまえば,うまくR10G10B10A2に収めることができます。
ちなみに,Octahedron Encodingですが,Z+の半球が約束されているのであれば符号ビットもいらないので,下記のHemi-Octで実現できるそうです。

…ということで接線空間データの圧縮についてでした。
参考文献
- [Cigolle 2014] Zina H. Cigolle, Sam Donow, Daniel Envangelakos, Michael Mara, Morgan McGuire, Quirin Meyer, “A Survey of Efficient Representations for Independent Unit Vectors”, Journal of Computer Graphics Techniques Vol.3, No.2, 2014.
- [JohnWhite3D 2017] John White 3D, “Signed Octahedron Normal Encoding”, https://johnwhite3d.blogspot.com/2017/10/signed-octahedron-normal-encoding.html, 2017.
- [Geffroy 2020] Jean Geffroy, Axel Gneiting, Yixin Wang, “Rendering The Hellscape of DOOM Eternal”, SIGGRAPH 2020 Advances in Real-Time Rendering course.
- [Ong 2023] Jeremy Ong, “Tangent Spaces and Diamond Encoding”, https://www.jeremyong.com/graphics/2023/01/09/tangent-spaces-and-diamond-encoding/, 2023.